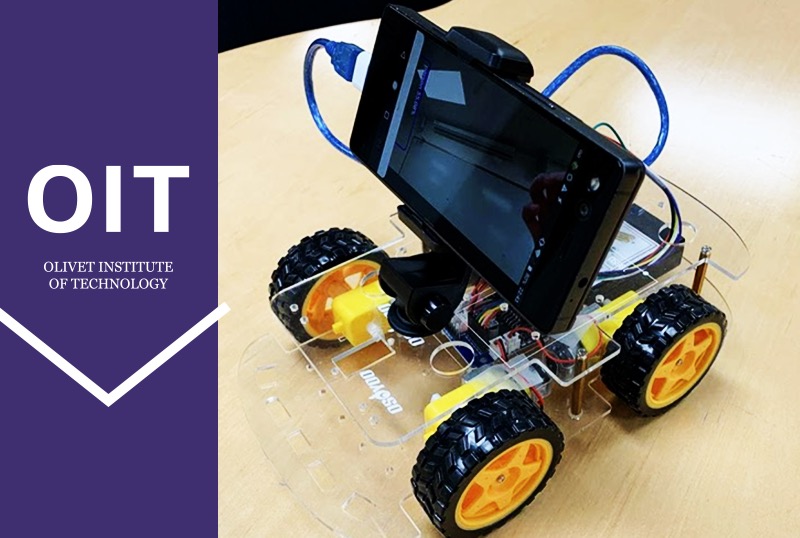
The San Francisco-based Olivet Institute of Technology Artificial Intelligence Lab reported progress in its first smart robot car prototype. The Arduino-based smart vehicle is capable of automatic cruising and following a target without crashing into obstacles.
Master of Information Technology senior student Peixin Wu has been working on this prototype as his capstone project under the mentorship of Professor Thomas Kong. Wu was inspired to start the smart robot car project when he conducted labs with Arduino in the Internet of Things course. The main modules of the smart vehicle include person location, obstacle detection, dynamic route planning, motor drivers, and Bluetooth communication system.
The smart car is based on Arduino's UNO R3, equipped with an ultrasonic sensor and ultrasonic holder to transmit and receive the signal between the car and the phone. A real-time object detection algorithm 'You Only Look Once' (YOLO) was implemented on the chip of the car this week. As a result, the smart vehicle is now able to follow a person who is walking. Wu plans to apply more algorithms to the car to enable it to perform more complex actions.
"This project can be an exploration of a new field for future potential applications for both hardware and software integration. We are excited to see the prototype, which is expected to be completed soon," Professor Kong said.